简介
URDF(Unified Robot Description Format)是ROS中使用的一种机器人描述文件,它以HTML的形式定义一个机器人。包含的内容有:连杆、关节名称,运动学参数、动力学参数、可视化模型、碰撞检测模型等。
参考链接
- http://wiki.ros.org/urdf
- http://wiki.ros.org/urdf/Tutorials
- http://www.vccoo.com/v/e418b9?source=rss
参考教程
- TF2教程
- Xacro教程
- Gazebo教程
URDF基础
使用URDF语言创建可视的模型
- 本教程使用URDF创建一个可视的模型,首先确保已经安装了Package:”joint_state_publisher”(使用rosdep安装,或使用apt-get安装urdf_tutorial)
- 一个URDF文件中,有一个
<robot name="">标签 - 有多个
<link name="">标签,表示机器人实体部件 - 有多个
<joint name="" type="">标签,表示机器人实体部件的连接(关节) - 在URDF以树结构保存机器人模型,具有一个根link
在rviz中查看
1$ roslaunch urdf_tutorial display.launch model:=urdf/01-myfirst.urdf代码完成的事情包括:
- 将urdf/01-myfirst.urdf文件中的urdf模型载入ros parameter server
- 启动Node发布消息到sensor_msgs/JointState主题,以及发布transform消息
- 启动RVIZ
可视化展示URDF树结构
12$ urdf_to_graphiz my_robot.urdf$ evince test_robot.pdf示例代码(source)
12345678910111213141516171819202122232425262728293031323334353637<?xml version="1.0"?><robot name="visual"><!-- 自定义材料属性 --><!-- 也可以自定义图片纹理属性 --><material name="blue"><color rgba="0 0 0.8 1" /></material><link name="right_leg"><!-- link表示机器人实体部件 --><visual><!-- 实体部件的视觉设置 --><geometry><cylinder length="0.6" radius="0.2"/><!-- 长0.6m,班级0.2米的圆柱体 --></geometry><origin rpy="0 1.57075 0" xyz="0 0 -0.3" /><!-- 实体部件的坐标 --><!--rpy:roll pitch yaw--><!-- 部件向z轴移动-0.3m,沿y轴旋转PI/2 --><material name="white" /></visual></link><joint name="base_to_right_leg" type="fixed"><!-- joint表示机器人实体部件的连接(关节) --><!-- joint类型可以是"fixed","continuous","revolute","prismatic" --><parent link="base_link" /><!-- joint连接两个实体部件,在URDF树上形成父子关系 --><child link="right_leg" /><origin xyz="0 -0.22 0.25" /><!-- 关节向y、z轴分别移动-0.22m、0.25m --></joint><link name="left_gripper"><visual><origin rpy="0.0 0 0" xyz="0 0 0" /><geometry><mesh filename="package://urdf_tutorial/meshes/l_finger.dae" /><!-- 实体部件外形可以导入外部模型文件 --></geometry></visual></link><joint name="left_tip_joint" type="fixed"><parent link="left_gripper" /><child link="left_tip" /></joint></robot>外部导入网格模型
- URDF支持DAE、STL、TIF等外部网格模型
- DAE模型可以定义颜色,因此可以不用在URDF文件中指定颜色或材质
使用sw2urdf从Solidworks中导出模型
- 下载sw2urdf安装
- 参考官方文档,在Solidworks中进行操作并导出(假设为urdf-test)
- sw2urdf导出的是package包,将导出的package包复制到/opt/ros/kinetic/share目录(echo $ROS_PACKAGE_PATH)
- 进入导出的urdf目录。roscd urdf-
- 执行roslaunch。roslaunch urdf_tutorial display.launch model:=urdf/urdf-testt.urdf
创建可移动的URDF模型
代码说明
- 在上一节基础上修改URDF文件的joint节点(source)
运行效果
1roslaunch urdf_tutorial display.launch model:=urdf/06-flexible.urdf gui:=true
- joint类型说明:
- continuous:可以从负无穷到正无穷的任意角度变化。相对于fixed,需要axis标签说明旋转轴
- revolute:效果和continuous类似,但是具有严格的旋转范围限制,出axis标签外,还需要limit标签的upper、lower限定最大、最小旋转角度(单位:弧度),effort、velocity限定最大旋转力矩、旋转速度
- prismatic:prismatic是平行移动关节,关节沿axis周平行移动,而不是沿轴旋转。因为prismatic是平行移动,因此可以用于产生伸缩效果。limit标签内容和revolute类似,差别是在prismatic中的单位是米
- 其他joint:planar——可沿平面平行移动(prismatic只能沿一个轴移动);floating——浮动关节,可以沿着三维空间任意方向移动
continuous示例代码
123456<joint name="head_swivel" type="continuous"><parent link="base_link"/><child link="head"/><axis xyz="0 0 1"/><origin xyz="0 0 0.3"/></joint>revolute示例代码
1234567<joint name="left_gripper_joint" type="revolute"><axis xyz="0 0 1"/><limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/><origin rpy="0 0 0" xyz="0.2 0.01 0"/><parent link="gripper_pole"/><child link="left_gripper"/></joint>prismatic示例代码
123456<joint name="gripper_extension" type="prismatic"><parent link="base_link"/><child link="gripper_pole"/><limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/><origin rpy="0 0 0" xyz="0.19 0 0.2"/></joint>
RVIZ中URDF模型控制原理
- rviz首先解析URDF文件,并查找到所有非fixed的关节及限制参数
- 将滑块数据广播到sensor_msgs/JointState中
- 然后使用robot_state_publisher来计算所有的坐标变换
- 计算结果用于在rviz中进行显示
手动创建URDF文件
URDF文件书写格式
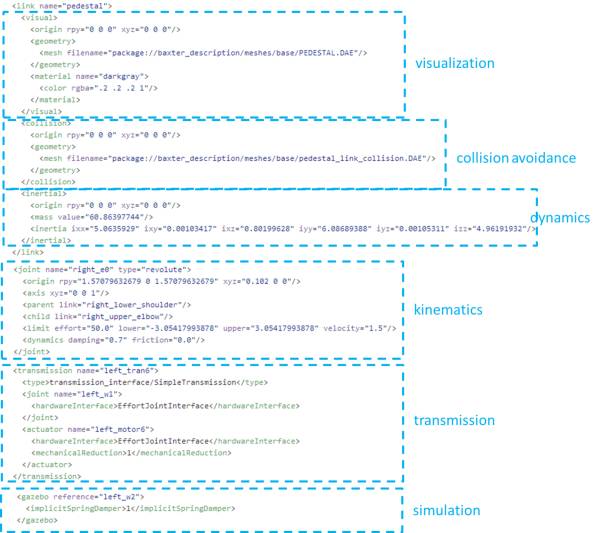
urdf模型中,包括:连杆link、关节joint、运动学参数axis、动力学参数dynamics、可视化模型visual、碰撞检测模型collision等。